
Designed by the Department of
Medical Physics
|
 |
|

In this section you could find images
and videos related to project SOCIAL:
-
sim_overview.mpg: This video
demonstrates the basic functionality of the Multi Agent
Based Simulation Environment (M.A.S.E.). In it five
simulated robots are included. The robots are controlled by
a simple state machine based on the subsumption
architecture. The controller has four simple behaviours:
a) wandering: randomly choosing a direction
b) obstacle avoidance: moving away from obstacles (grey
lines shows range-finders' range while green lines shows
range-finder contacting obstacle)
c) follow signal: trying to follow a RF field emitted by
peers. (the semi transparent grey spheres surrounding
robots)
d) goal seeking: robots try to reach the fault's core using
its three pH sensors. Fault position is indicated with a
magenta coloured point while its field is signalled with a
semitransparent magenta sphere.
e) The movie also shows the camera operators that allows
users to pan, tilt, zoom and reverse-zoom the camera.
-
Snapshots from the SOCIAL CAA Maker module
Figure 1:
Designing an SNN with the SOCIAL CAA Maker
Figure 2:
A sample SRM neuron (ComplexNode) designed with the CAA
Maker
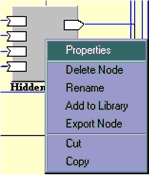
Figure 3:
Node's Popup Menu
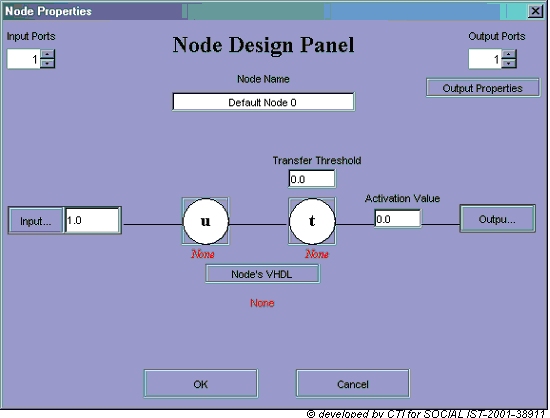
Figure 4:
Defining an SNN node’s properties
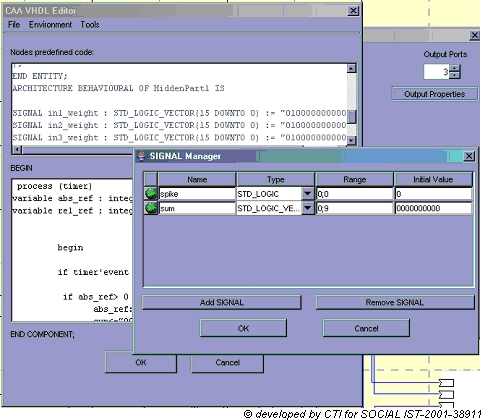
Figure 5:
The VHDL toolkit of the CAA Maker
|
|
 |
 |
 |

The project is funded by the European
Community under the "Information Society Technologies" Programme
(01/01/2003 -
31/05/2006) |
 |
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}